[데일리포스트=송협 선임기자] “이번 연구는 장수풍뎅이 날개의 충돌 에너지 흡수 원리를 규명하고 독자적 기술로 구현하는데 의미가 있습니다. 이에 그치지 않고 저밀도 대기 비행이 가능하고 비행효율이 더 높은 곤충 모방 비행 로봇 연구를 지속할 계획입니다.” (박훈철 스마트운행체공학과 교수)
비행하는 과정에서 장애물과 충돌을 하더라도 추락하지 않고 비행을 유지할 수 있는 똑똑한 풍뎅이 모방 날갯짓 비행로봇 개발에 성공한 국내 과학자가 ‘과학기술인상’에 선정돼 주목받고 있다.
과학기술정보통신부(이하 과기정통부)와 한국연구재단은 이달의 과학기술인상 8월 수상자에 건국대학교 스마트운행체공학과 박훈철 교수를 선정했다.
8월의 과학기술인상 수상자로 선정된 박 교수는 장애물과 충돌해도 추락하지 않는 장수풍뎅이의 날개와 비행 원리를 규명하고 모방한 ‘날갯짓 비행 로봇’을 개발해 우주 저밀도 대기에서 비행이 가능한 미래 항공우주기술 기반을 마련한 공을 인정받았다.
최근 국가적 차원에서 민간 차원의 상업적인 우주여행 도전이 성공하면서 우주탐사의 지평이 확대되는 이른바 ‘뉴 스페이스’ 시대가 본격화되면서 장애물과 충돌해도 추락하지 않는 정찰과 탐사 임무 수행이 가능한 곤충 모방 날갯짓 로봇을 개발은 민간 우주산업 기술의 자양분이 될 전망이다.
그동안 다양한 연구와 개발을 통해 낮은 대기 밀도에서 비행이 가능한 곤충 모방 로봇을 개발하려는 시도가 많았다.
하지만 일반적인 새와 달리 꼬리날개가 없는 곤충의 비행방법은 기술적으로 구현이 어렵다보니 장시간 비행에 성공한 사례는 쉽지 않았다.
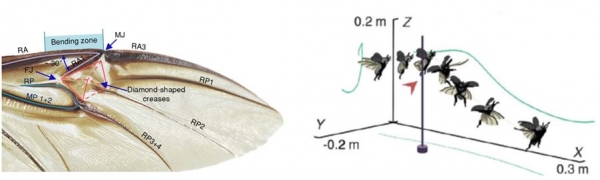
무엇보다 뒷날개 중간을 접었다 펼쳐서 비행하는 풍뎅이는 충돌에도 안정적인 비행이 가능한 반면 뒷날개가 완전히 펼쳐지는 과정은 명확하게 규명하기 어려웠다.
이 같은 규명을 밝혀내기 위해 박 교수는 초고속 카메라 촬영을 바탕으로 장수풍뎅이의 뒷날개가 처음 날갯짓으로 발생하는 공기력과 관성력으로 완전히 펼쳐진다는 사실을 확인했다.
여기에 비행 중에 장애물 충돌로 뒷날개가 접히더라도 중앙부의 충돌 에너지 흡수로 짧은 시간 내 다시 펼쳐져서 안정된 비행이 지속될 수 있다는 것을 입증했다.
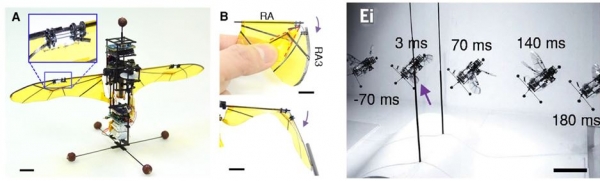
박 교수팀은 이 같은 원리를 적용해 날개에 충돌 에너지 흡수 장치를 부착한 곤충 모방 날갯짓 비행로봇 ‘KU비틀’을 개발했다.
‘KU비틀’은 날개가 장애물과 충돌할 경우 날개가 접히면서 충격을 완화하고 다시 펼쳐져서 비행하는 방식이다.
앞서 지난해 12월 박 교수팀의 곤충 모방 날갯짓 비행로봇 ‘KU비틀’ 연구결과는 국제학술지 사이언스 온라인판에 게재됐다.
한편 ‘이달의 과학기술인상’은 우수한 연구개발 성과로 과학기술 발전에 공헌한 연구개발자를 매달 1명씩 선정해 과기정통부 장관상과 상금 1000만 원을 수여하고 있다.